תפקידו להמיר אנרגיה חשמלית לאנרגיה מכנית סיבובית.
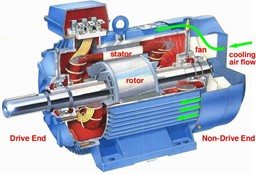
כל מנוע חשמלי מורכב משני חלקים עיקריים:
1. רוטור שהינו החלק המסתובב.
2. סטטור שהינו החלק הקבוע ומהווה את גוף המנוע.
מנוע השראה תלת פאזי מורכב מסטטור שבו ליפוף תלת פאזי, ורוטור כלוב, בין הרוטור לסטטור ישנו מרווח אוויר המאפשר מעבר של השטף המגנטי ותנועתו החופשית של הרוטור.
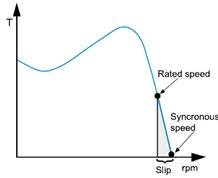
עם חיבור המנוע להזנת רשת תלת פאזית ייווצר בסטטור שדה מגנטי מסתובב, כאשר המהירות היא:
n- מהירות השדה המסתובב
f- תדר הרשת (Hz)
p- מספר זוגות הקטבים במנוע השטף במנוע:
n=(60*f)/p
השטף הנוצר בשדה הסטטור שבו הרוטור נע, משרה במוליכי הרוטור כא"מ, לפי חוק יד ימין. כא"מ זה מייצר זרם, אשר זורם במוליכי הרוטור, המקוצרים ביניהם במוט (מכאן שמו רוטור כלוב).
במוליכים אלה יפעל כוח לפי הנוסחה:
B – -השדה מגנטי
I – הזרם במוליכים
L – אורך המוליך
F=Lx*Ix*Bx
הכא"מ הנ"ל גורם להיווצרות מומנט, אשר גורם לסיבוב הרוטור לאותו הכיוון של השטף השקול.
לפיגור מהירות הרוטור אחרי מהירות השדה אנו קוראים חליקה.
וככל שהפיגור גדול יותר הזרם ברוטור גבוה יותר (נגרם גם מעומס יתר או מנוע תפוס וגורם לחימום המוליכים, ככל שהטמפ' גבוהה יותר הסיכוי לנזק בבידוד סלילי המנוע גבוהים יותר).