תכנון מערכת הנע היא משימה אשר צריך להתייחס אליה בזהירות רבה ובכובד ראש.
*אנו נתייחס בפוסט זה למנוע AC בלבד אך קיימת מערכת עבור מנוע המוזן ב מתח וזרם DC.
התכנון דורש ידע על כלל המערכת:
מערכת הזינה והארקות, כלל המכונות בתהליך, התנאים הסביבתיים של המנוע הווסת או מתנע וכו'.
ככל שנקדיש יותר זמן לשלב התכנון והבדיקה כך נחסוך בעלויות ההקמה בתקלות ושינויים.
מבנה המערכת:
מערכת הנע AC לרוב מורכבת משנאי הזנה או חיבור ישיר לרשת, ווסת מהירות,
מנוע AC (מנועי ההשראה נפוצים מאוד בתעשייה) ועומס המחובר אל ציר המנוע.
בתוך ווסת המהירות מותקנים גשר מיישר, פסי צבירה ויחידת מהפך DC ל AC.
בשוק קיימת האפשרות למערכת מרובת ווסתים אשר מורכבת מיחידת השנאה אחת משותפת וכל יחידות המהפכים מחוברות אל פס-צבירה DC משותף.
שלב איסוף המידע:
- בדוק מול ספק הרשת שלך, על-מנת לבחור את הווסת והמנוע המתאימים עליך לבדוק את מתח העבודה
400 או 690 וולט (קיים במפעלים) ותדר הרשת 50 הרץ בישראל.
*תדר הרשת אינו מגביל את טווח המהירויות של האפליקציה. - בדוק את דרישות התהליך: האם ישנה דרישה למומנט בהתנעה? מהי המהירות בה תשתמש? ומהו סוג העומס
נרחיב בהמשך על חלק מהעומסים האופיינים. - בחירת המנוע- מנוע חשמלי הינו מקור מומנט שצריך לעמוד בהעמסת יתר ומסוגל לייצר כמות מספקת של מומנט. אין להקל ראש בטווח טמפרטורת העבודה של המנוע.
וכמו כן יש להשאיר מרווח של 30 אחוז למומנט המקסימלי כאשר מחשבים את המומנט המקסימלי הקיים. - בחירת ווסת מהירות- רשת ההזנה והמנוע שנבחר מכתיבים את סוג הווסת. יש לבצע בדיקה כי הספק הווסת מתאים ואף גבוה מספיק כדי לייצר את הזרם והמתח הדרושים ליצור המומנט הנדרש..
כמו-כן יש לתת עדיפות לווסתים שבהם ניתן לעבוד בעומסים שמעבר לעומס הקבוע בזמנים קצרים ומחזוריים, בהתאם לנדרש ע"פ התהליך .
יסודות
כדי להבין את התהליך עלינו להניח מספר יסודות בסיס.
ראשית, כל מנוע השראה הופך אנרגיה חשמלית לאנרגיה מכאנית.
המרת האנרגיה מבוססת על השראות אלקטרו מגנטית.
תופעת ההשראות יוצרת במנוע החלקה- מהירות סיבוב המנוע נמוכה ממהירות סיבוב השטף המגנטי.
ההחלקה (SLIP) מוגדרת בנקודה הנומינלית של המנוע :
תדר Fn
מהירות nn
מומנט Tn
מתח Un
זרם In
הספק Pn.
בנקודה בה החליקה היא נומינלית Sn:
נוכל להשתמש בנוסחה Sn=(Sn-nn)/ns*100

מהו מומנט?
מומנט הוא מדידת האנרגיה הדרושה לסיבוב ציר המנוע.
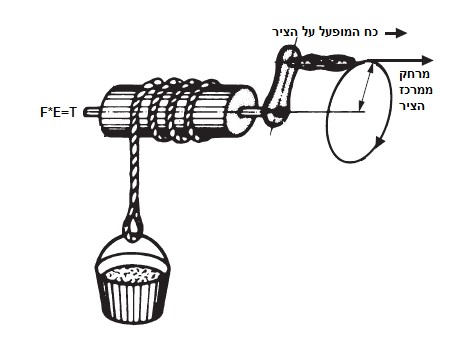
מתוך נסיון מעשי אנו יודעים כי ניתן להסביר ולהביא כדוגמה את הרמת דלי בבארות מים.
הכח הדרוש "F" להרמת המשא תלויה באורך הידית "E". ככל שהידית ארוכה יותר כך צריך להפעיל פחות כח, הכפלת האורך פי שתיים תחלק את הכח הדרוש ב שתיים.
מומנט הוא מדידת האנרגיה הדרושה לסיבוב ציר המנוע.
מתוך נסיון מעשי אנו יודעים כי ניתן להסביר ולהביא כדוגמה את הרמת דלי בבארות מים.
הכח הדרוש "F" להרמת המשא תלויה באורך הידית "E". ככל שהידית ארוכה יותר כך צריך להפעיל פחות כח, הכפלת האורך פי שתיים תחלק את הכח הדרוש ב שתיים.
נוסחת המומנט כתלות בכח ואורך הידית T=F*E
לדוגמה:
דלי מים השוקל 20[N] וקוטר סיבוב הציר של הידית הוא 20 ס"מ המרחק מחושב עפ"י הרדיוס ולכן מחולק ל 2 מכאן שהמרחק הוא 10ס"מ,
*בחישוב אנו מציגים במטר.
לכן המומנט = [20N*0.1=2[Nm
במידה ונגדיל את מרחק הידית מהציר נקטין את הכח הדרוש. למשל עבור ידית במרחק 40 ס"מ נצטרך כח של 5[N].
ההספק מחשב את מהירות צריכת האנרגיה.
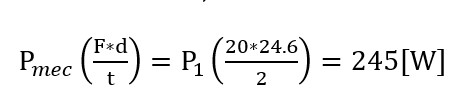
בהתחשב בדוגמה הקודמת אם עומק הבאר 24.5 מטר האנרגיה [W] הנדרשת כדי להרים את הדלי מהתחתית למעלה תמיד תהיה זהה.
משקל*מרחק=האנרגיה הדרושה לביצוע המשימה 20[N]*24.6[m]=490[Nm].
שים לב אומנם השימוש ביחידות [Nm] זהה גם למכאניקה וגם לחשמל אך הפעולה עצמה היא שונה ויש להתייחס לכך.
1[Nm]=1[J]=power * time=watts * second
הספק מציג את מהירות צריכת האנרגיה ומחושב ע"י חילוק סה"כ האנרגיה למשך זמן העבודה הדרוש.
לכן הרמת הדלי מהקרקעית עד למעלה ב 2 שניות תדרוש הספק של:
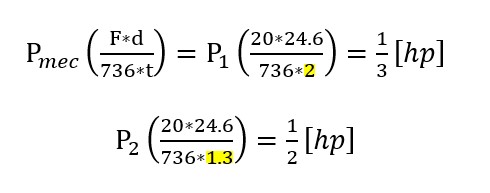
נניח ונרצה לקצר את הזמן ל1.3 שניות לשם כך נצטרך הספק של 377[W] (החלפה בנוסחה את הערך 2 ב 1.3).
כוח סוס מול וואט
בישראל נהוג להשתמש בגודל ההספק של המנוע אך גם ביחידות כח סוס [HP].
היחס בין יחידות ההספק ל כח הסוס הן:

את חישוב כח הסוס למנועים הנ"ל נבצע כך:
*בצהוב הדגשתי את הזמנים השונים של 1.3 ו 2 שניות

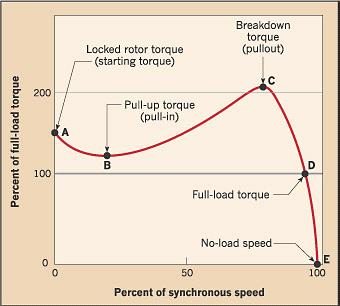
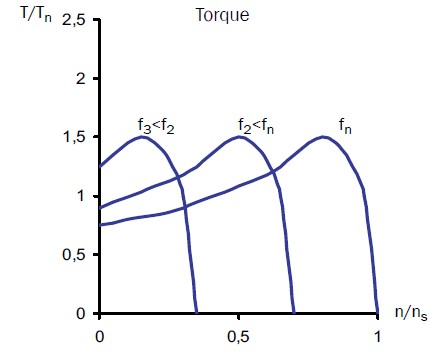
מומנט במנוע השראה סטנדרטי (Tmax) נקרא גם מומנט נק' הבריחה או מומנט היציאה והוא בדרך-כלל פי פעמיים שלושה מהגודל של המומנט הנומינלי.
המומנט המקסימלי מתקבל כשהחליקה Smax גדולה יותר מאשר החליקה הנומינלית.
בכדי להביא את המנוע (השראה) לדרגת ניצילות גבוהה יותר כדאי להישאר בתוך תחום ה- (-Smax…Smax) אותה ניתן להשיג ע"י בקרת תדר ומתח.
וכפי שהכותרת של הפוסט מציין את פעולת בקרה זו ניתן לממש בעזרת ווסת המהירות.
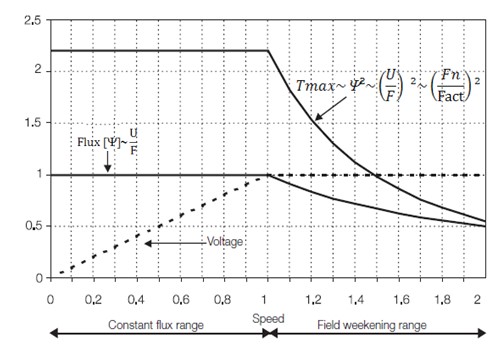
בתמונה מתחת ניתן לראות את השטף המגנטי מתחלק ל 2:
מנקודת המהירות הנומינלית (1) התדר שנמצא מתחת לאותו תדר הנומינלי (צד שמאל) נקרא "תחום שטף קבוע" מכיוון שאין שינוי בשטף.
אך התדרים הנמצאים מעל לתדר הנומינלי (צד ימין) הם תחום היחלשות השדה אשר בו השטף משתנה (נחלש ויורד).
אזור הפעולה של המנוע יהי אם כך בתחום השדה הקבוע.
הסיבה היא כמובן שמאחר ועוצמת השטף נחלשת נדרש יותר זרם לתחזק את המומנט,
כאשר אנחנו עובדים בתחום השדה הנחלש הזרם שנצרך מהרשת משמש למגנות הברזל בסטטור שכן השטף קטן והגדלת הזרם יוצרת יותר שטף.
לכן מנוע הפועל בתחום השדה הנחלש פועל בעוצמה קבועה ולא ממשיך לטפס בדומה לתחום השטף הקבוע זו הסיבה שתחום זה נקרא גם בשם תחום המומנט/כח הקבוע.
ע"פ המחקרים הראו כי המומנט המקסימלי של מנוע השראה פורפרציונלי לשטף המגנטי בריבוע.
המומנט נחלש מעבר לנקודת השדה החלש ביחס הפוך לתדר בריבוע, בעברית קלה, עליה בתדר תגרור ירידה בעוצמת השטף המגנטי בריבוע.